基于Simulink的通信系统仿真
通信原理——Simulink仿真
模拟调制
FM —— 角度调制
FM 发射机
Simulink FM 调制框图展示: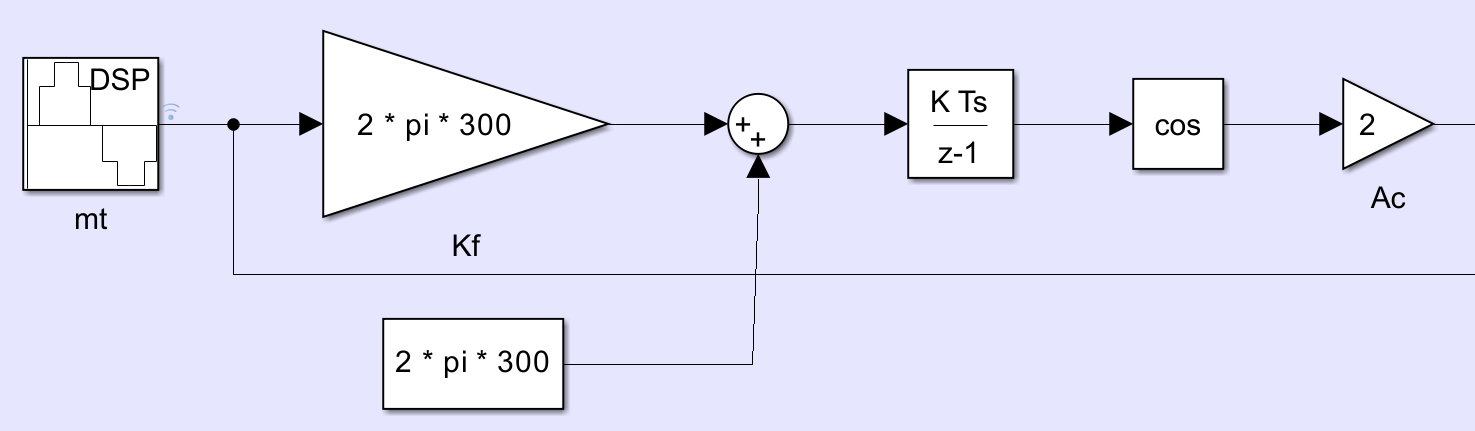
上述框图是离散时间的调频调制器,主要框架及原理如下: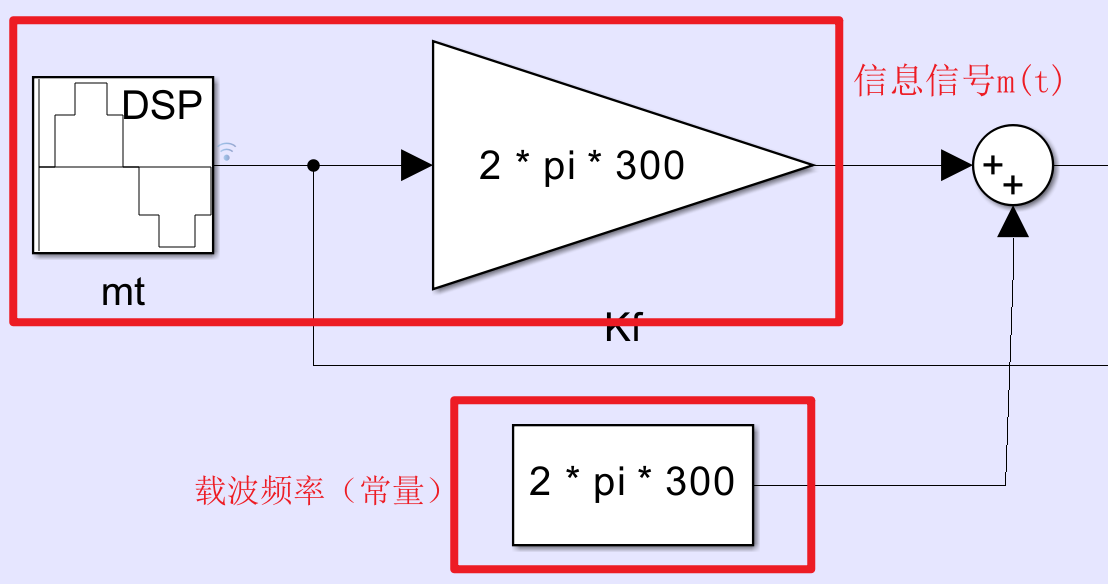
- 来自 DSP 的基带消息信号,表示调制信号;通过一个增益块,乘上 $K_f$,表示每一伏电压对频率的影响因素。
- 常量模块
2π * 300,表示载波的角频率部分。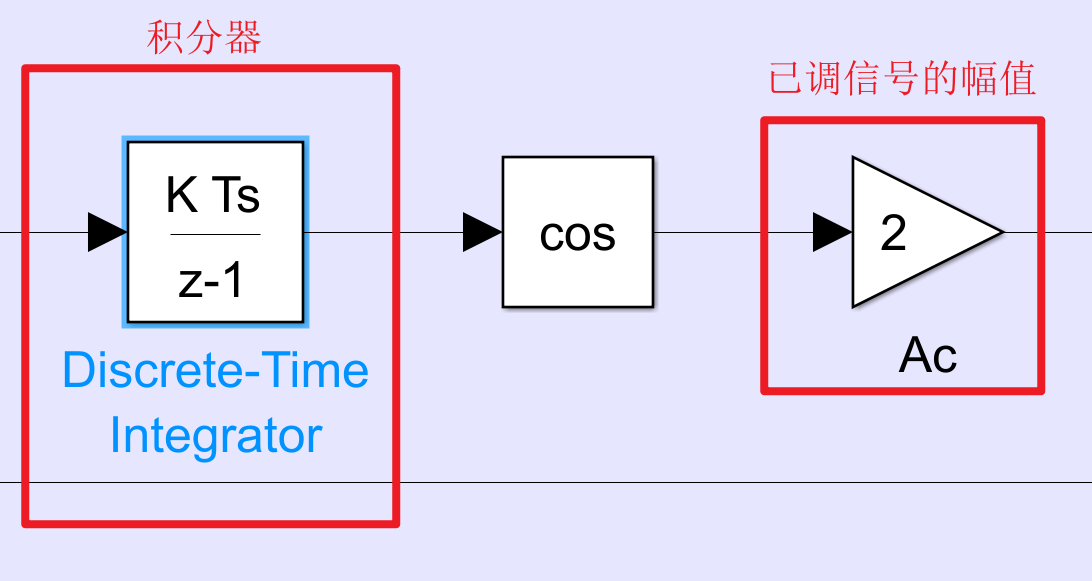
将两个分量相加得到已调信号的瞬时频率,再通过离散时间域上的积分器实现调频:
$$
H(z) = \frac{K T_s}{z-1}
$$
已知调频信号的一般数学形式为:
$$
s(t) = A_c \cos \Big( 2 \pi f_c t + K_f \int m(t) , dt \Big)
$$
已调信号的瞬时频率随着时间而改变。上述式子是以 $PM$ 的形式实现的 $FM$,对整个 $\phi (t)$ 求导可以发现瞬时频率与 $m(t)$ 有关:
$$
f_s = 2\pi f_c + K_f m(t)
$$
- 载波频率: $f_c = 300 ,\text{Hz}$
- 调制信号: $m(t)$,由 DSP 输出
- 调频灵敏度: $K_f = 2\pi \cdot 300$
- 积分器:实现 $\int m(t) , dt$,相位与输入消息相关
- 余弦函数:生成调频信号
- 幅度调制:由系数 $A_c$ 控制
因此,输出信号可以表示为:
$$
s(t) = A_c \cos \Big( 2\pi f_c t + K_f \int m(t) dt \Big)
$$
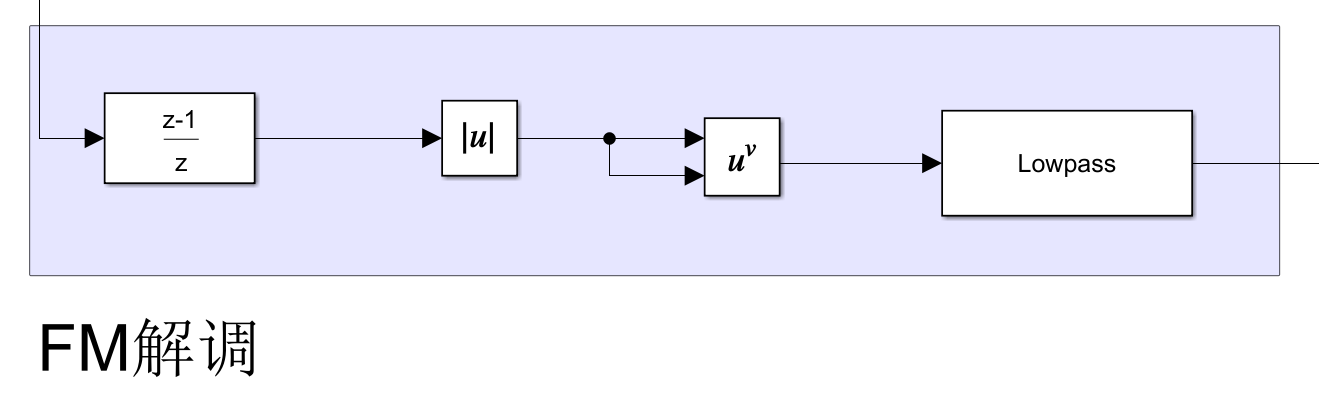
FM 解调机
差分运算 $\dfrac{z-1}{z}$
- 实现输入信号的差分(类似微分器)。
- 在离散时间中,$(z-1)/z$ 对应:
- 物理意义:从输入 FM 信号中提取相位的变化(即瞬时频率)。
取绝对值 $|u|$
- 得到差分信号的幅度,避免相位正负变化带来的符号翻转。
平方 ($u^v, v=2$)
- 对信号平方,等价于能量检测。
- FM 的瞬时频率与信号相位的变化率有关,平方后可以稳定地恢复与消息信号成比例的包络。
低通滤波器 (Lowpass)
- 经过差分和平方后,信号中包含高频分量(载波分量)。
- 低通滤波器去除高频,只保留基带分量,即解调出的消息信号 $m(t)$。
FM 已调信号通过差分器后:
$$
\dot{s}(t)=\frac{d}{dt}\big[A_c\cos\theta(t)\big]
= -A_c\sin\theta(t),\dot{\theta}(t)
= -A_c,\omega_i(t),\sin\theta(t)
$$
相位信息通过求导成功从余弦函数中提取出来。对输出的结果进行平方:
$$
y^2(t) \propto A_c^2,\omega_i^2(t),\sin^2\theta(t)
= \frac{A_c^2}{2},\omega_i^2(t),\big(1-\cos 2\theta(t)\big)
$$
将平方后的信号通过低通滤波,可以滤去高频的信号,从而得到信息信号(带有直流偏置):
$$
u_{\text{LP}}(t);\propto;\omega_i^2(t)
= \big(2\pi f_c + K_f m(t)\big)^2
= (2\pi f_c)^2 + 2(2\pi f_c)K_f,m(t) + K_f^2 m^2(t)
$$




